 Astrocytes, long believed to only give structural and nutritional support to neurons, are now regarded as key cells in neural information processing. Using the long, thin tendrils protruding from their bodies, astrocytes form tripartite synapses with pre- and post-synaptic neurons. In the lab, we are developing neurophysiologically constrained models of astrocytic-neural networks that can link astrocytic functions and dysfunctions to brain computation and astrocyte-implicated brain diseases.
Astrocytes, long believed to only give structural and nutritional support to neurons, are now regarded as key cells in neural information processing. Using the long, thin tendrils protruding from their bodies, astrocytes form tripartite synapses with pre- and post-synaptic neurons. In the lab, we are developing neurophysiologically constrained models of astrocytic-neural networks that can link astrocytic functions and dysfunctions to brain computation and astrocyte-implicated brain diseases.
The functional role of astrocytes in brain computation has long been a focus of intense study. Our computational models aim to help to anyone studying their role, be it in typical individuals, neurological disease, or animal models. Our modeling work is also relevant for clinicians and scientists studying the origin of neurodegenerative and neurodevelopmental disorders at the level of the synapse, as they offer novel and highly testable hypotheses that can be easily addressed and perhaps add new therapeutic avenues to the ones currently pursued
We are exploring the role of astrocytic-neural interactions in brain oscillations and plasticity. See on your left how a simple Neural-Astrocytic Network can exhibit slow (0.5 Hz) and infra-slow (0.1 Hz) oscillations.
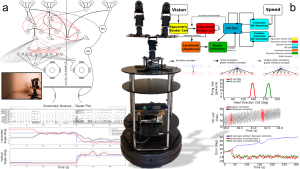 An orthogonal direction towards biomimesis is to imitate the most robust biological controller: the brain. We develop controllers that aim to bring brain-mimesis further down the cellular level, where adaptation is an intrinsic mechanism of the emulated cells. We develop spiking neural network (SNN) models of the biological spatial system and of the oculomotor system, to develop a robot that does not only behave but also processes information similarly to how we do. This approach is also helping us further our understanding of brain function – and dysfunction.
An orthogonal direction towards biomimesis is to imitate the most robust biological controller: the brain. We develop controllers that aim to bring brain-mimesis further down the cellular level, where adaptation is an intrinsic mechanism of the emulated cells. We develop spiking neural network (SNN) models of the biological spatial system and of the oculomotor system, to develop a robot that does not only behave but also processes information similarly to how we do. This approach is also helping us further our understanding of brain function – and dysfunction.
On a basic level we aim at a quantitative understanding of embodied intelligence. On an applied level we are interested in both autonomous robotic systems and human-machine-interactions, as sensorimotor learning and decision-making in artificial systems constitute a cutting-edge technical challenge.
 The introduction of impedance control in 1985 by Neville Hogan paved the way for a safe, gentle and effective interaction between humans and machines. This interaction is ideal for rehabilitation and is epitomized in the design of manipulanda that pioneered clinical and neurological applications, the most prominent being the MIT-MANUS, developed by Hermano Igo Krebs. Following this line of research, we have recently introduced the MIT’s pediatric Anklebot, an adaptive robotic device that provides an “assist-as-needed” therapy and targets ankle movements in children with neurological disorders (Michmizos et al. 2015). Since 2012, the rehabilitation robot has been used successfully in pilot studies in Pediatric Hospitals in the USA and Europe.
The introduction of impedance control in 1985 by Neville Hogan paved the way for a safe, gentle and effective interaction between humans and machines. This interaction is ideal for rehabilitation and is epitomized in the design of manipulanda that pioneered clinical and neurological applications, the most prominent being the MIT-MANUS, developed by Hermano Igo Krebs. Following this line of research, we have recently introduced the MIT’s pediatric Anklebot, an adaptive robotic device that provides an “assist-as-needed” therapy and targets ankle movements in children with neurological disorders (Michmizos et al. 2015). Since 2012, the rehabilitation robot has been used successfully in pilot studies in Pediatric Hospitals in the USA and Europe.
To design the robot and its rehabilitation games, we considered the needs and special characteristics of children with cognitive and perceptual deficiencies that accompany motor disorders. We researched on whether the sensorimotor control of the upper extremities generalizes, and to what extent, to the lower extremities.
Macroscopically, we demonstrated the adequacy of Fitts’s law to predict the ankle performance in ankle movements (Michmizos & Krebs 2014a); this study verified that the central nervous system controls the speed and accuracy of ankle movement in the same way as in upper extremities. Mesoscopically, we found a remarkable similarity between the models that describe the speed profiles of ankle pointing movements and the ones for the upper extremities (Michmizos et al. 2014). Microscopically, we found that the reaction time for the ankle movements increased with the number of stimuli at an equal pace, as would be predicted by Hick-Hyman law in hand movements. Interestingly, we found evidence that there are differences in ankle muscle innervations that affect reaction time (Michmizos & Krebs 2014b)
Click on the CBS News link to watch a story on how our robot helped a young stroke victim reclaim his future.
 One of the biggest challenges in neurodevelopmental disorders today is that they remain behaviorally diagnosed disorders. Despite the large amounts of data from the autistic brain and an abundance of experimental evidences for its pathophysiology, no measures robustly depict the observed differences between an autistic and a typically developing brain. Recently, we measured functional connectivity in the somatosensory cortex in typically developing and autistic children using magnetoencephalography (MEG) and found an imbalanced bimodal pattern in autism: long-range feedback and local connectivity are reduced while long-range feedforward connectivity is increased. The MEG data correlated strongly with behavioral measures of sensory processing and autism severity, and classified autism diagnosis blindly with 89% accuracy (Khan, Michmizos et al. 2015).
One of the biggest challenges in neurodevelopmental disorders today is that they remain behaviorally diagnosed disorders. Despite the large amounts of data from the autistic brain and an abundance of experimental evidences for its pathophysiology, no measures robustly depict the observed differences between an autistic and a typically developing brain. Recently, we measured functional connectivity in the somatosensory cortex in typically developing and autistic children using magnetoencephalography (MEG) and found an imbalanced bimodal pattern in autism: long-range feedback and local connectivity are reduced while long-range feedforward connectivity is increased. The MEG data correlated strongly with behavioral measures of sensory processing and autism severity, and classified autism diagnosis blindly with 89% accuracy (Khan, Michmizos et al. 2015).
We introduced the notion of using a biophysically realistic computational model to explain the differences between the autistic and normal brain. The differences are captured by parameter modifications that support the hypothesis that feedforward and feedback pathways are imbalanced in autism (Michmizos et al. 2014; Khan, Michmizos et al. 2014). The simulation results open the door to further development of the model, allowing for testable predictions.
Click on the MedicalXPress link to read how brain connections can give clues to sensory problems in autism.
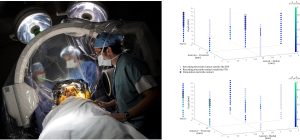 Neurosurgeons have used electrical stimulation since the 60’s to locate and distinguish specific brain areas. They soon discovered that stimulation of certain brain nuclei suppresses the symptoms of some neurological disorders. Recent efforts on patient-specific therapeutic approaches revealed the importance of computational methods in guiding deep brain stimulation (DBS), a neuromodulation treatment initially applied to motor diseases that is fast expanding to include affective disorders, among others. A major pitfall in DBS is that the result depends on the precise implantation of the stimulation electrode within the affected nucleus, which is a trial-and-error procedure that often cannot elude adverse side effects.
Neurosurgeons have used electrical stimulation since the 60’s to locate and distinguish specific brain areas. They soon discovered that stimulation of certain brain nuclei suppresses the symptoms of some neurological disorders. Recent efforts on patient-specific therapeutic approaches revealed the importance of computational methods in guiding deep brain stimulation (DBS), a neuromodulation treatment initially applied to motor diseases that is fast expanding to include affective disorders, among others. A major pitfall in DBS is that the result depends on the precise implantation of the stimulation electrode within the affected nucleus, which is a trial-and-error procedure that often cannot elude adverse side effects.
Recently, we introduced a functional biomarker that uses the beta band of the intracortical microelectrode recordings to predict the long-term DBS outcome, at least in terms of a heuristic, gross categorization of the response to treatment (Michmizos et al. 2015). We have further expanded this research with a machine learning approach that identified a handful of intraoperatively acquired signal features that predicts the DBS outcome (Kostoglou et al. 2016). Our 10-years research on DBS has also targeted on the debatable relationship between the local field potential and the spike activity (Michmizos et al. 2011, 2012a, 2012b).
This research is supported by the 2016-2018 Charles & Johanna Busch Biomedical Grant Award.




